January 30, 2023
SOCM, or how to combine robots' functionalities.
The Symbiotic Operation Control Module, the strength of the collective.
What is SOCM?
SOCM, or Symbiotic Operation Control Module, is the way to create virtual robots able to integrate their different capabilities in order to carry out tasks that either cannot be done by a single robot or because it will be more efficient to do it by combining several functionalities of several robots. INTREPID’s entity responsible for this module is CERTH.
As an example of this symbiosis, one may imagine drones (UAV), which are not able to open a door. In order for a drone to scan an area that is block by a closed door, a terrain robot (UGV) should assist and open the door. SOCM will handle the sequencing of the different mini tasks, once the drone has been given the mission to scan a closed area. SOCM will ask the UGV to come in to help an unblock drone’s way by opening the door. By combining their functionalities, the drone can enter the premises and do the scanning.
In more detail, the overall procedures that will take place are the followings:
- The INMOS system will receive a request to locate a place and then the IAM module will advise that it cannot do that with a single drone, and that it needs to combine the functionalities of the drone and the UGV.
- To do so, IAM will send a mission to the SOCM saying that it wants a virtual robot combining a drone and a UGV to do this mission.
- Therefore, SOCM will handle the way the 2 robots (drone and UGV) will collaborate to fullfil the task at hand.
Symbiotic Operation Control Module (SOCM) is used for:
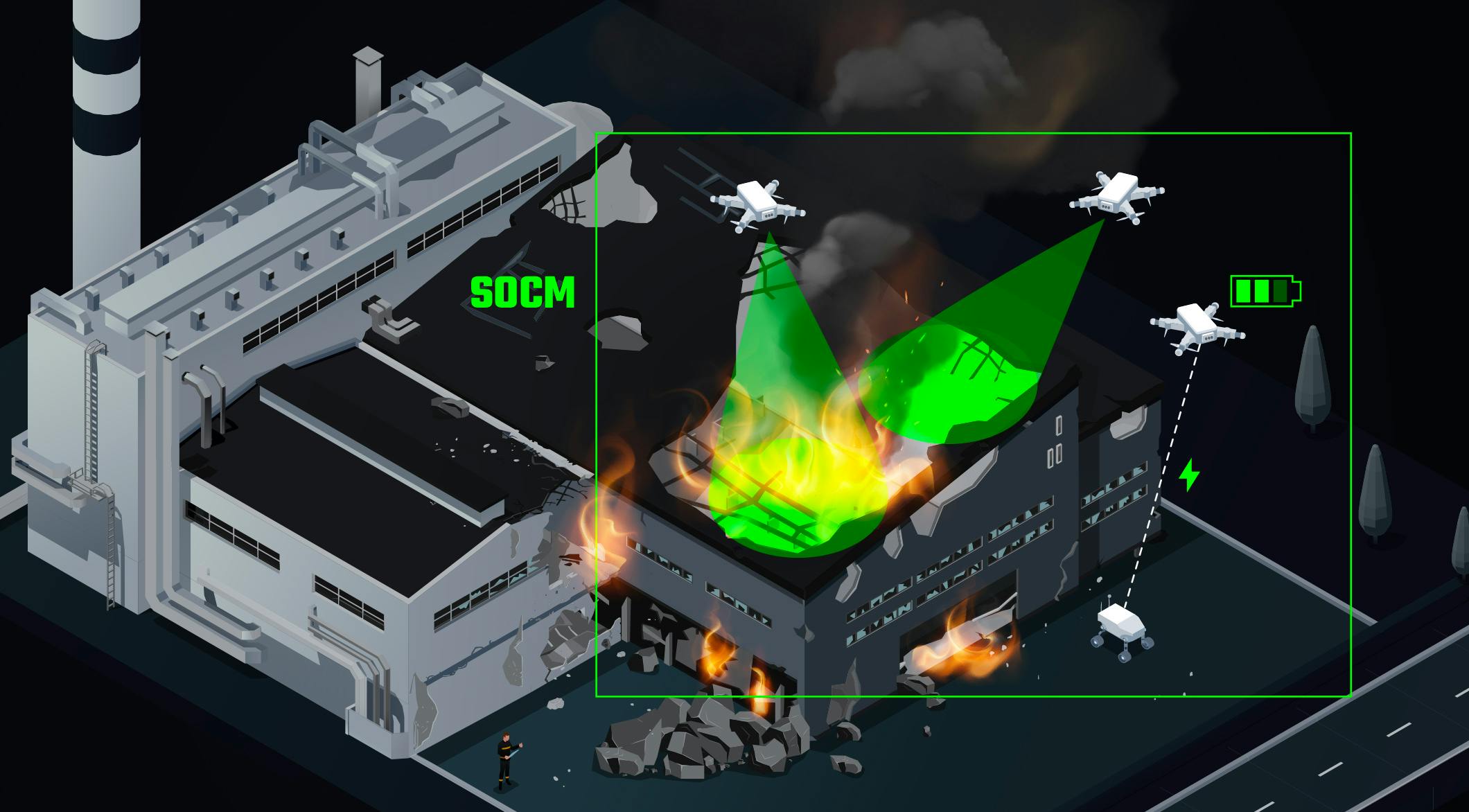
- Optimization for Symbiotic (Collaborative) Scan Missions. Symbiotic scan area mission using more than one UxVs. The system gives ”scan mission” providing info about the area that has to be scanned and the set of UxVs that will do the scan. However, it does not define which agent will scan which sub-area. Here it comes SOCM which takes into account the battery level of the agents, their speed and their location and splits the given area to sub-areas and assigns each one to each agent for scanning aiming at the minimization of the total scan time.
- Collaborative UAV charging on top of UGV agents. In this case SOCM gets the “charging mission” along with the UAV (that has to be charged) the UGV (that will charge the UAV) and the coordinates of a location in which both agents have to go. In this scenario SOCM orchestrates the movement of the agents since it sends messages to both, tracks their position and gives command at the right time.
The functionalities
The SOCM is based on the intrinsic capabilities of the robots (e.g., I am a UAV, I can't open a door by myself) but also constrained on other objectives such as doing the final task faster in time or wasting as little energy as possible.
For instance, if the commanding officer want to launch a task, the IAM will try to understand the best agents possible for the work. At this time, it will be decided if SOCM or Mission Controller (MC) will need to take the lead. Therefore, the SOCM divides the instructions for each robot in order to complete the task in the best way possible based on the aforementioned criteria...
Next steps
Right now, SOCM is using a combination of rule-based criteria and deep learning techniques. INTREPID’s aim is to integrate rules into the training process of the deep learning algorithms built to support SOCM.
During Pilot 3, the next and last Pilot, 2 SOCM missions should be tested: symbiotic scan area and collaboration UAV-UGV charging.
Want access to exclusive INTREPID content? 💌 Subscribe to our newsletter! 💌
Let's keep in touch



