January 09, 2023
RTPM - the combined positioning solution for first responders.
The real-time positioning module includes several devices for determining the position of agents.
What is RTPM?
The RTPM or Real Time Positioning Module, is a family of different devices that allows the first responders to know their own position in real time, as well as the position of their team members. Our partner FOI is in charge of this module.
The RTPM is designed to handle different situations and use complementary sensors technologies. Since each type of sensor works better in some conditions than in others, we want to combine several of them to make something that works more robustly and accurately over time.
The RTPM requires no pre-installed components in the environment. If you have the luxury of putting markers or magnets or reference beacons in the environment beforehand, first responders could position themselves extremely accurately, but in the INTREPID use case first responders (FRs) arrive on the scene where nothing is installed, and they have to act fast, using only what they bring.
Complementary sensors increase robustness
The RTPM uses:
- Foot mounted motion-sensing devices
- Near-infrared stereo cameras
- Thermal stereo cameras
- Ultra-wideband radio ranging system
- Laser scanner
- Global navigation satellite system (GNSS) sensor
- Sensor fusion

Foot sensors.
- The foot-mounted sensors measure step lengths very accurately and sense even very subtle changes in direction of the feet. Integration of such data over time gives an estimate of the position. A challenge of such inertial measurement units (IMUs) in general is that the error can grow quite quickly over time. However, in RTPM we exploit the fact that during a walking or running cycle a foot stands still for even a short moment of time, and we can reduce the drift quite significantly and can maintain reliable estimates for several minutes.
- An inherent limitation of the foot-mounted sensors is that they have no perception of the environment and thus no ability to recover once an error occurs, say, when a foot slips or the first responder moves in an unusual manner. Therefore, FOI combine this type of sensor with cameras-based simultaneous localization and mapping (SLAM) techniques, to increase robustness to changing conditions. In situations where camera-based techniques have problems, such as in scenes with low contrast and few features (landmarks), the foot-mounted sensors can maintain a good enough position estimate until the camera finds something to “lock on” to.
- The helmet-mounted RTPM version sports cameras in the near-infrared and the thermal infrared domains. Thermal cameras give the capability to navigate in hot and smoke-filled environments. In addition to position information, the cameras track the orientation of the wearer’s head in real-time, so that team members can relay important information to each other by knowing where they are currently looking. The precision of the helmet-mounted camera is usually below 1% (1 meter if the user walks 100 meters).

Helmet-mounted RTPM with thermal stereo cameras.
- The RTPM’s Ultra-wideband (UWB) radio-based ranging system measures distances between team members. This provides yet another means of positioning and further increases the robustness. While camera-based based systems work better in buildings with lots of walls and objects for cameras to look at, the precision and range of the UWB sensing go up in less cluttered environment and can help maintain position information when other systems struggle.
- The laser scanner is on the robot (UGV) for extra precision. It measures distances very accurately and has longer effective range than the camera system.
- The GNSS is commonly available and really useful as soon as first responders are outdoors, to take care of their basic position needs and to provide reference points to the other sensors. A typical example is when first responders move in and out of buildings. Then the GNSS helps tie everything together in the same reference system.
- The sensors complement each other and they can be combined in different configurations depending on requirements concerning accuracy, size, weight, etc. The current main task is to find the best way to fuse data from the sensors to make separate components work together as an integrated unit.
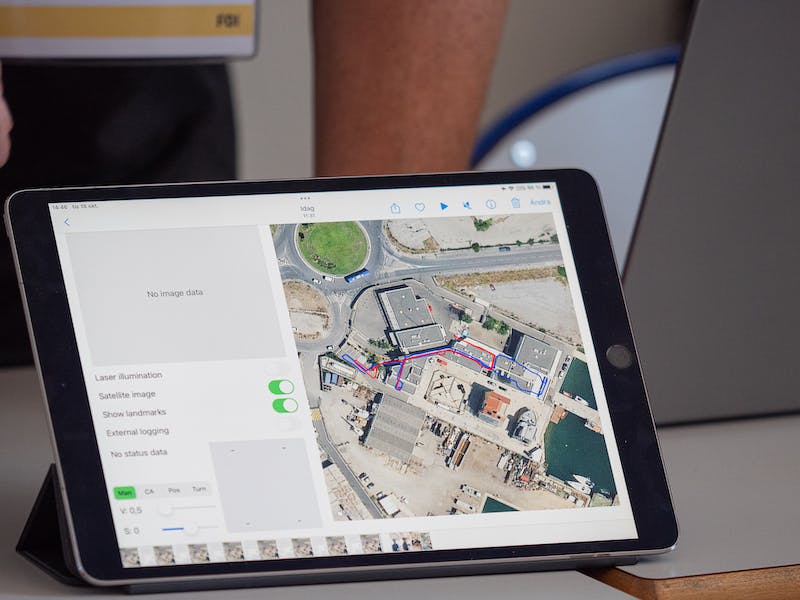
Positioning tracking on a map.
📸 Jens Lind
Want access to exclusive INTREPID content? 💌 Subscribe to our newsletter! 💌
Let's keep in touch



